Pourquoi 10 Hz est préférable à 20 Hz pour un suivi précis : comprendre les fréquences d'échantillonnage GNSS
En matière de suivi des mouvements, il peut sembler intuitif de penser que plus c'est mieux. Une fréquence d'échantillonnage plus élevée, telle que 20 Hz (20 points de données par seconde), semble permettre un suivi plus fluide et plus précis qu'une fréquence de 10 Hz.
Mais dans les applications GNSS réelles, une fréquence d'échantillonnage plus élevée n'entraîne pas toujours une meilleure précision. En fait, 10 Hz offre souvent le meilleur équilibre entre précision, stabilité et fiabilité.
Voyons pourquoi c'est le cas.
Erreurs GNSS : pourquoi les positions ne sont pas parfaites
Chaque estimation de position GNSS est influencée par plusieurs sources d'incertitude inévitables, notamment les retards atmosphériques, les erreurs d'horloge des satellites, les réflexions de signaux (appelées trajets multiples) et le bruit aléatoire des récepteurs.
Même en position parfaitement immobile, votre position GNSS « vacillera » légèrement à cause de ces effets. Il est essentiel de comprendre ce bruit de fond pour décider d'une fréquence d'échantillonnage optimale.
Compromis entre des taux d'échantillonnage plus élevés
Des fréquences d'échantillonnage plus élevées augmentent le nombre de points de données, mais elles présentent des inconvénients importants qui réduisent la qualité globale des données :
- Temps de traitement du signal limité : la réduction du temps entre les mises à jour signifie que le récepteur a moins de possibilités d'appliquer des techniques de filtrage et de correction d'erreurs.
- Diversité des satellites réduite : les récepteurs GNSS modernes peuvent recevoir simultanément les signaux des satellites GPS, Galileo, GLONASS et BeiDou. Cependant, à des fréquences d'échantillonnage plus élevées, en fonction des limites de traitement internes de l'appareil, le récepteur peut ne pas utiliser pleinement toutes les constellations de satellites disponibles, ce qui réduit considérablement la précision.
En termes simples : à des fréquences d'échantillonnage très élevées, vous enregistrez simplement plus de bruit, pas plus de mouvements réels.
Améliorer les données à des fréquences d'échantillonnage plus faibles
Pour maintenir la précision du suivi sans augmenter le bruit à des fréquences d'échantillonnage GNSS plus élevées, nous appliquons deux stratégies principales :
- Interpolation entre les correctifs GNSS : plutôt que de capturer des mises à jour de position bruyantes et hautement corrélées à 20 Hz, nous collectons des positions plus nettes et plus précises toutes les 100 millisecondes à 10 Hz. Lorsqu'une résolution temporelle plus élevée est nécessaire, nous utilisons des techniques d'interpolation pour estimer le mouvement entre ces fixes GNSS fiables. Cela permet d'obtenir une trajectoire fluide et réaliste sans introduire de bruit artificiel ni surcharger le système de mesures redondantes.
- Fusion de capteurs avec des données IMU à haute fréquence : pour les applications nécessitant un chronométrage extrêmement précis, comme la détection du départ exact d'une course d'aviron ou la capture de changements de direction rapides, nous complétons les données GNSS par des mesures provenant de notre unité de mesure inertielle (IMU) intégrée, qui peut échantillonner à des fréquences allant jusqu'à 2 000 Hz. Ces données de mouvement à haute fréquence garantissent que les événements rapides sont capturés avec un niveau de détail extrême, ce qui permet une analyse précise des mouvements sans compromettre la stabilité de la trajectoire de suivi globale.
Il est important de se rappeler que des techniques telles que l'interpolation et la fusion de capteurs peuvent rendre le suivi des mouvements plus détaillé, mais qu'elles ne fonctionnent bien que si les données GNSS sont stables et précises. En combinant ces méthodes avec soin, nous proposons un suivi des mouvements réaliste, fiable et qui fonctionne bien dans des situations réelles.
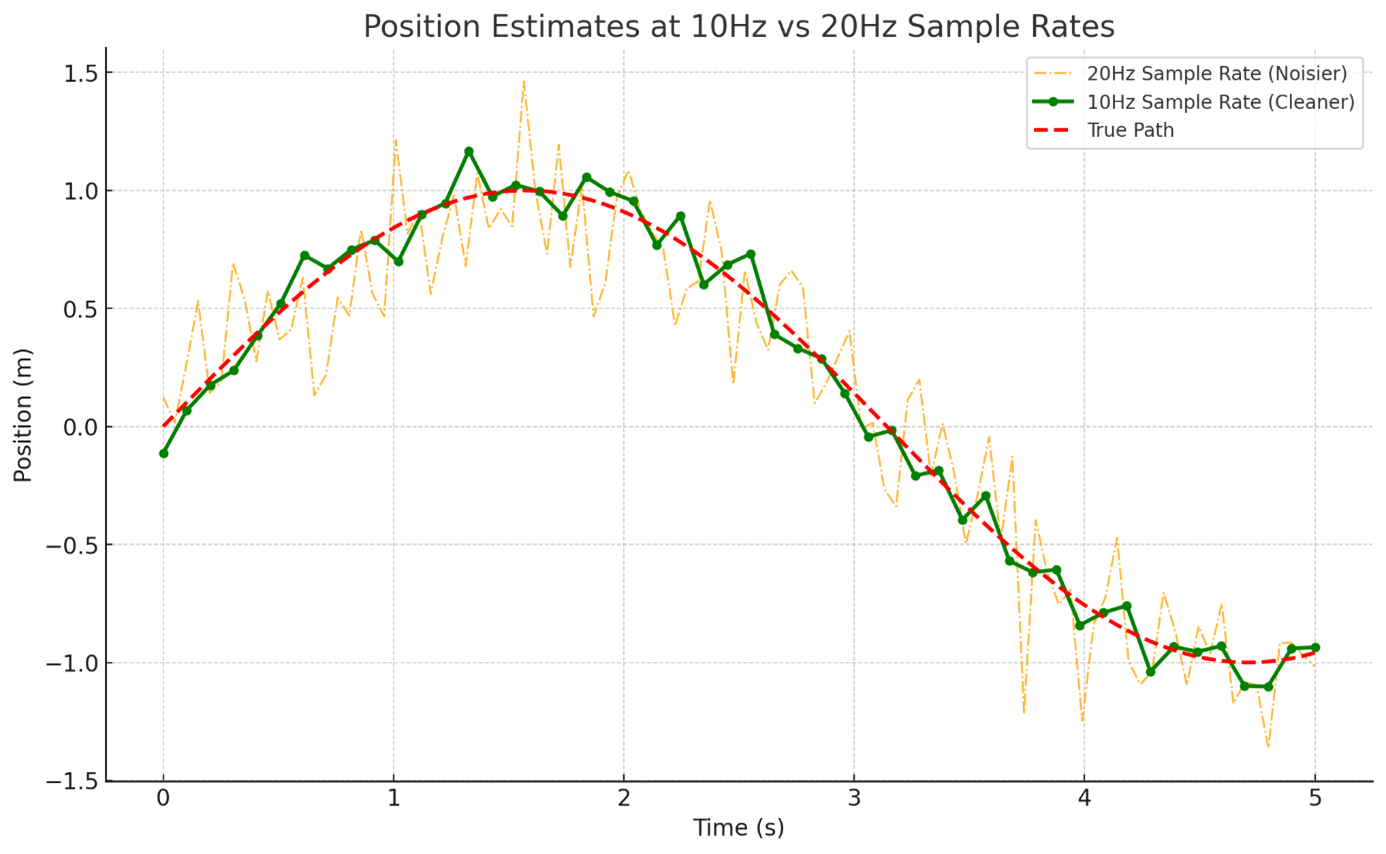
Exemple concret : suivi à 10 Hz contre 20 Hz
Le graphique suivant illustre la différence entre les estimations de position lors de l'échantillonnage à 10 Hz et à 20 Hz :
Conclusion : pourquoi nous avons choisi 10 Hz pour notre détecteur de mouvements
Après des tests approfondis en conditions réelles, nous avons découvert que l'utilisation d'une fréquence d'échantillonnage GNSS de 10 Hz offrait la meilleure combinaison entre un positionnement net et précis et une utilisation efficace des ressources du système.
Grâce aux données GNSS 10 Hz fournissant une colonne vertébrale stable et à notre IMU à haut débit capturant les moindres détails des mouvements rapides, les utilisateurs peuvent avoir confiance en leurs résultats de suivi des mouvements dans un large éventail d'activités sportives et dynamiques.
Des fréquences d'échantillonnage plus élevées peuvent sembler impressionnantes sur le papier, mais lorsqu'il s'agit d'obtenir une précision, une stabilité et des données de mouvement fiables dans le monde réel, 10 Hz est tout simplement le meilleur choix.
